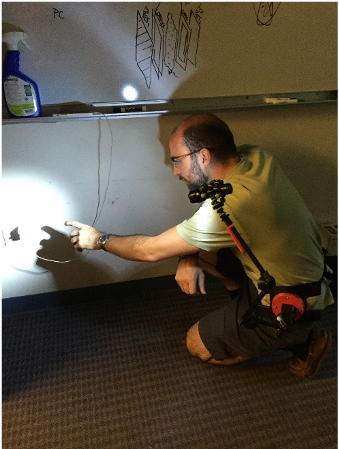
This project investigated the design of wearable robotic arms for augmenting and assisting humans in everyday tasks. Rather than studying complex industrial, prosthetic, orthotic, orthopedic, and rehab technologies, we asked what tasks can the simplest arm perform. From our point of view, the very simplest arm has, in fact, no motors at all, it just has brakes. Having brakes on the arm enables a user to manually move the arm to a desired position and then lock it in place by engaging the brakes. Once locked in place the arm will stay in the same location relative to the user until unlocked. This enables different actions relative to your body including grasping, supporting, exerting forces, and more. None of these requires external power, merely the setting of the brakes. This greatly simplifies the design and implementation and lacks the safety challenges of powered arms. Setting the brakes can be done manually or via low-power detent mechanisms. Two versions of the arms were developed, as described below. In addition we describe a novel 4-state brake.
The purpose of these arms was to study design tradeoffs between strength and task capability, comfort and payload support of body mount apparatus, passive dynamic behavior, workspace size, stowage and deployment of the arms, donning and doffing of the system, among many others. We also developed a series of “end-effectors” for the arms, for both generic and specific tasks.

3rd Arm V1 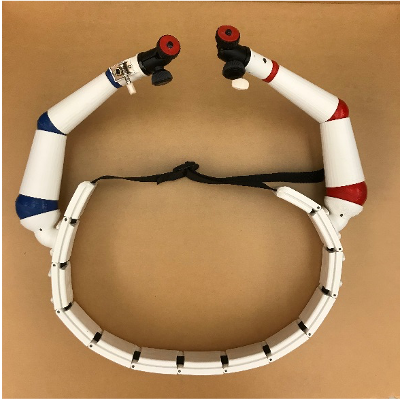
3rd Arm V2 
4 state brake 
3rd Arm powered 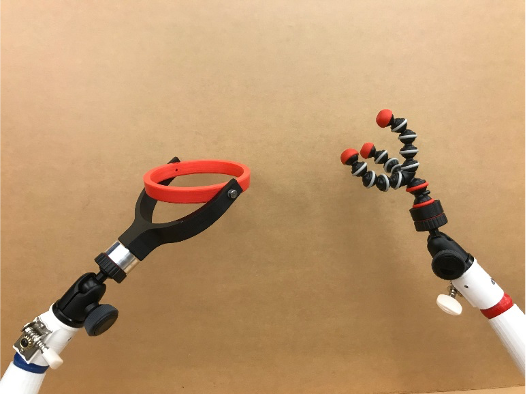
3rd Arm various end effectors