|  |
Project Description
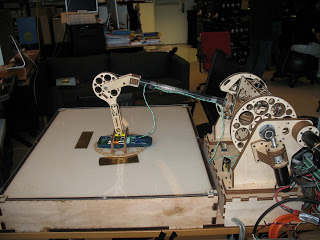
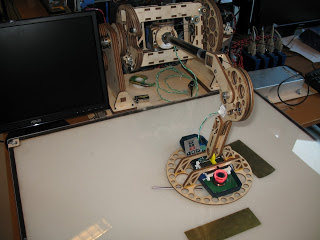
The goal of this project is to develop a high-fidelity robot arm that can perform human tasks under force control. The current prototype is a 4-DOF (active) robotic arm being developed in the Salisbury Robotics Lab with sponsorship from Bosch R&D. This video shows the arm moving a Bosch stud-finder to locate and map metal objects underneath the table. One eventual goal is to be able to send this robot arm to map the structures embedded in a wall so that a contractor knows where to work on the wall.
Bosch Arm Stud-Finding YouTube Video
Project Staff
- Qiao Zhao
- Ben Wilson
- Ashley Wellman
Status
Active since 2009.
Funding Sources
Bosch R&D.