Project Description
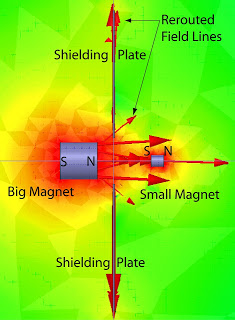
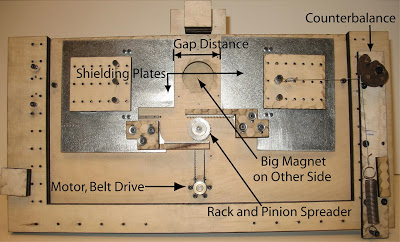
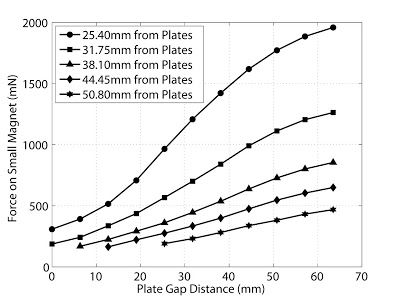
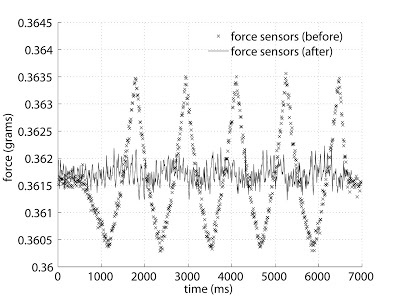
Magnetic actuation can be used for minimally invasive control of medical devices such as robotic catheters. However, current systems that use large permanent magnets are limited in their ability to modulate the magnetic force. In this project, we developed a proof-of-concept system for closed loop force control of a permanent magnet using shielding materials. Our system consists of a device that actuates pieces of high-permeability metal (hymu-80) to redirect magnetic lines of flux. This is used to regulate the attractive force exerted by a large controlling magnet on a smaller moving magnet. We determined empirically and theoretically that a there is a linear relationship between the shielding gap distance and the force between the large and small magnets. Using our system, we were able to regulate a constant force on a small magnet whose distance from the larger magnet was varied in a triangular waveform. Without our system, the force would have varied strongly with the varying distance.
Related Publications
R. D. Brewer, K. E. Loewke, E. F. Duval, and J. K. Salisbury, “Force Control of a Permanent Magnet for Minimally-Invasive Procedures.” International Conference on Biomedical Robotics and Biomechatronics, 2008, pp. 580-586. (PDF)
Project Staff
- Reuben Brewer
- Kevin Loewke
- J. Kenneth Salisbury
Status
Inactive.
Funding Sources
None.