Project Description
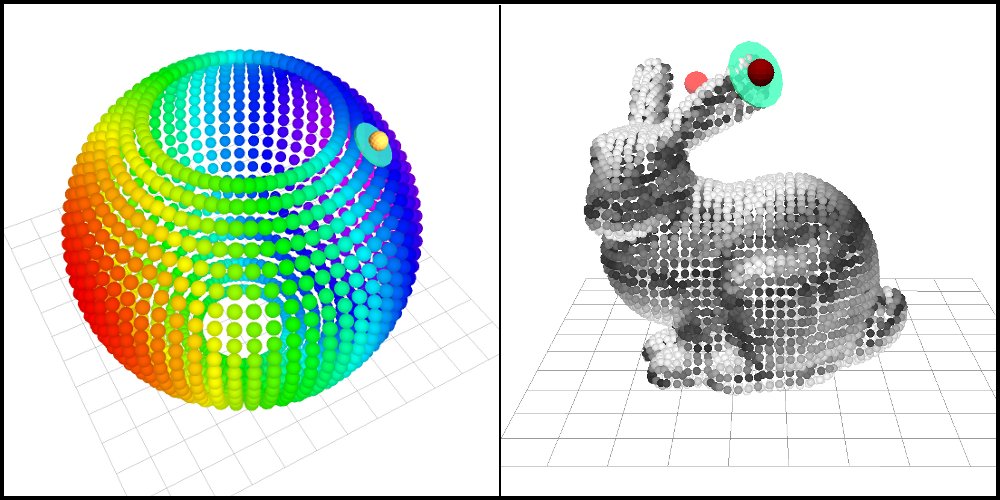
We present a constraint-based haptic rendering algorithm for arbitrary point cloud data. With the recent proliferation of low-cost range sensors, 3D point cloud data is readily available at high update rates. Challenges in haptic rendering of this data arise due to noise and poorly defined surface composition. We propose that point cloud data can be rendered as an implicit surface, which can be formulated to be mathematically smooth and efficient for computing interaction forces. This method is resistant to sensor noise, makes no assumptions about surface connectivity or orientation, and has fast pre-processing suitable for streaming data from a sensor.
YouTube Video
Project Staff
Status
Active since 2002.
Funding Sources
Funded through VA Grant.